





基于DSP通讯全桥开关电源的研究与设计
摘要:针对传统开关电源中损耗较大,超调量较大,动态性能较差等问题,提出了基于DSP的全桥软开关技术。
通过Matlab仿真结果表明模糊自适应PID控制算法比传统PID控制算法在超调量、调节时间、动态特性等性能上具有优越性。
关键词:DSP;全桥开关;功率因数;Matlab
0 引言
高频开关电源以其重量轻、体积小、高效节能、输出纹波小、容量大等优点,在通讯和低电压行业得到了广泛的应用,且逐步在电力系统中得到应用。
尤其随着电信业的迅猛发展,电信网络总体规模不断扩大,网络结构日益复杂先进,作为通讯支撑系统的通讯用基础电源系统,市场需求逐年增加,其动力之源的重要性也日益突出。
庞大的电信网络高效、安全、有序的正常运行,对通信电源系统的品质提出了越来越严格的要求,推动了通信电源向着高效率、高频化、模块化、数字化方向发展。
近年来,由于软开关技术的不断发展与成熟,已逐步应用在开关电源中,尤其在中大功率的全桥变换器中应用最为广泛,这使电源转换效率得到提高。
由于传统模拟控制电路结构复杂,一经设计完成其控制策略就不能改变等缺点的存在,数字式控制方式得到发展。
并随着开关电源在通讯,监控等功能上的扩展,数字电源已逐步取代传统模拟电源。
1 系统框图
图1为软开关全桥变换开关电源拓扑。
虚线框以内为控制电路,虚线框以上为主电路。
主电路主要包括输入整流滤波、功率因数校正,全桥变换电路、高频变压器、输出滤波电路。
控制电路主要由采样电路、控制和保护单元、监控单元等组成,并为了保证控制电路及相关电路正常工作还必须包括辅助电源。
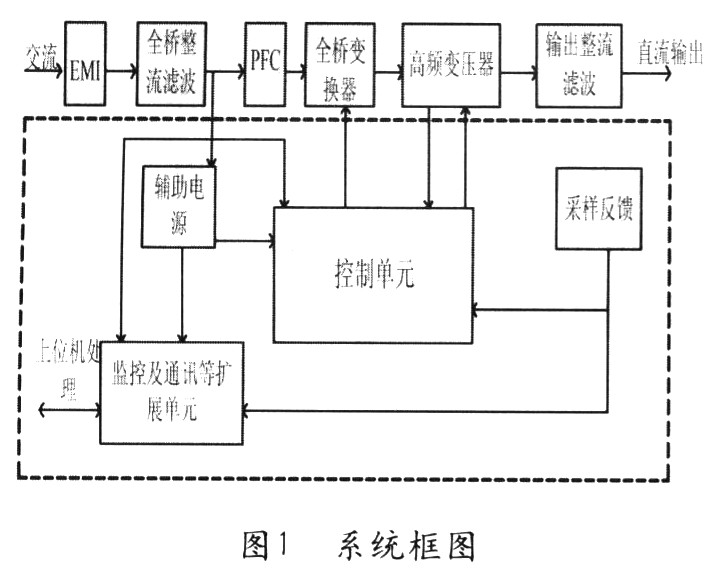
本电源采用ZVS—PWM拓扑,单相220V交流输入,经过PFC模块后为直流400V,主功率管采用MOSFET管,控制部分由DSP控制电路,电压电流双闭环控制。
输出采用全波整流并进行无源LC滤波。
2 主电路设计
针对48V/20A的通讯高频开关电源,其主电路采用移相式全桥变换器拓扑。
移相全桥软开关控制器具有恒频软开关运行、移相控制实现方便、电流和电压应力小、巧妙应用寄生电容等优点。
移相控制作为全桥变换器特有的一种控制方式,是指保持每个开关管的导通时间不变,同一桥臂的开关管的相位互差180°。
然而对于全桥变换器来说,当只有对角的开关管同时导通时主变压器才输出功率。
所以可以通过调节对角的两个开关管导通重叠角的宽度来进行稳压控制,而在功率器件环流期间,它又利用变压器的漏感以及功率半导体器件的结电容或者外加的附加电感电容的谐振来实现功率管的零电压或者零电流换流。
1)有源PFC设计
有源功率因数校正技术的基本思想是在整流电路与滤波电容之间加入DC/DC变换,通过适当控制使输入电流的波形自动跟随输入电压的波形,使输入阻抗呈纯阻性,即通过控制开关元件,切换滤波电感和滤波电容充放电能量实现功率因数的提高。
本设计中采用的是平均电流控制Boost功率因数校正电路,PFC控制芯片采用NCP1653。
该PFC控制芯片的主要工作原理是同时控制输入电流与输出电压,而电流控制回路的命令是由整流后的线电压所决定,所以可以使转换器的输入阻抗呈现电阻性。
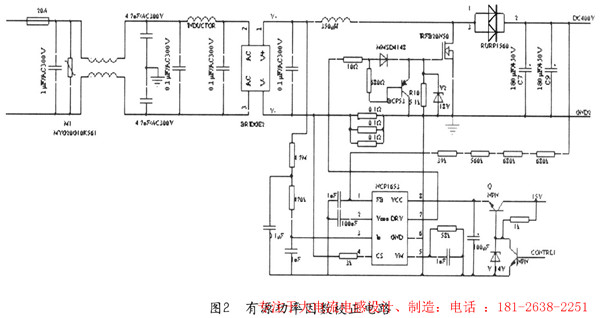
具体系统原理图如图2所示。
2)全桥变换器设计
全桥变换器电路如图3所示。
该拓扑中MOS管采用IRFB20N50,流过的最大电流为20A,最大电压为500V。

3)驱动电路设计
驱动电路如图4所示。
PWM输出与驱动芯片之间采用安华高公司生产的高速光藕HCPL一0710,它的速度可达到15M。
驱动芯片采用国际整流器公司的IR2181,该芯片具有速度快,驱动电压高等特点,特别适用于驱动MOSFET、IGBT等器件。
4)主变压器的选择
高频变压器是DC/DC变换器的核心元件,其作用有三点:能量转换、电压变换和输入输出之间的隔离。
变压器设计的好坏不仅影响变压器本身的发热和效率,同时也影响到开关电源的技术性能和可靠性。
同时,许多其他主电路元件的参数设计都依赖于变压器的参数。
因此,在主电路拓扑确定以后首先应该进行的是变压器的设计。
其设计步骤为:a、变压器匝比的计算;b、变压器磁芯的选择;c、绕组匝数的计算;d、绕组导线规格的计算。
(1)匝比的计算
设定K为变压器原副边匝比,Udc(min)为输入电压的最小值,Dmax为副边最大占空比,Uo为输出直流电压,UD为输出整流二极管的通态压降,ULf为输出滤波电感Lf上的直流压降。
考虑到移相控制方案存在副边占空比丢失现象,选择副边最大占空比为0.85,Uin(min)为PFC输出电压的最小值380V,假设输出整流二极管通态压降为1.5V,输出滤波电感上的直流压降为0.5V,则可根据经验公式
所以实际中取K=7
(2)磁芯的计算
在计算好匝比以后,可以根据以下经验公式求解,Ae为磁芯磁路截面积;Ac为磁芯窗口面积;PT为变压器传输功率;fs为开关频率;△B为磁芯材料所允许的最大磁通密度的变化范围;dc为变压器绕组导线的电流密度;kc为绕组在磁芯窗口中的填充因数。
并且我们将本设计中电源的参数代入求之得

根据以上的计算并根据铁氧体磁芯生产产家提供的技术手册,我们可以选择PQ50/50磁芯,可以满足要求。
其中Ap=14.2024cm4≥2.4cm4
(3)匝数的计算
选取好磁芯后,先计算副边绕组匝数。

选定N2=4,根据匝比我们可以选定N1=28。
(4)导线规格的选择
根据所计算的原副边电流值,并考虑集肤效应,采用电流密度为4A/mm2的导线,可以计算得出所需导线的截面积为0.89mm2的,因此可以采用铜导线来进行绕制,通过分析计算可以得出,我们采用φ0.4铜线8股并绕28圈作为初级绕组,因副边有两组绕组,所以通过它的电流有效值为0.632Io=12.64,所以其绕组截面积为3.16mm2,所以采用φ0.4铜线26股并绕4圈作为次级绕组。
5)谐振电感设计
谐振电感用来实现滞后桥臂的零电压开关,为开关管的零电压开关提供足够的能量。
为实现滞后桥臂的零电压开关,必须满足
其中Lr是谐振电感,I是滞后桥臂开关管关断时原边电流的大小,CDS是开关管漏源极电容,Udc是母线直流电压。

其中谐振电感值按0.7倍满载以上实现零电压开关设计,取负载电流为2A(取满载电流的10%)时滤波电感的电流临界连续,即式中的脉动量为4A。
开关管IRFB20N50的漏源极电容为85pF。
所以将上述结果代入经验公式可以得到

6)输出滤波电路设计
(1)输出电感的选择
电感将决定在输出侧纹波电流的大小,且它的值与纹波电流的大小有关。
电感值是以输入侧的交流电流峰值所决定的。
而交流侧的峰值电流是出现在电压为最小值时,根据一般的经验考虑电感上的纹波电流取交流侧峰值电流的20%,所以。
根据下述经验公式可以得到电感L。
电感电流出现最大峰值时的占空比为
(2)输出电容的选择
输出电容的选择应满足最大输出纹波电压u的要求,而输出纹波几乎完全由滤波电容的等效串联电阻的大小决定,通常通过选择合适的等效串联电阻来满足输出纹波电压的峰一峰值的,这里取u为0.1V。
因此有
另外,对于铝电解电容器,在很大容值及额定电压范围内,其ResrCf的乘积基本不变,为50×10-6~80×10-6。
根据ResrCf的平均值来求解Cf,即
实际选用三个60V/1000μF的电解电容器并联。
7)采样电路设计
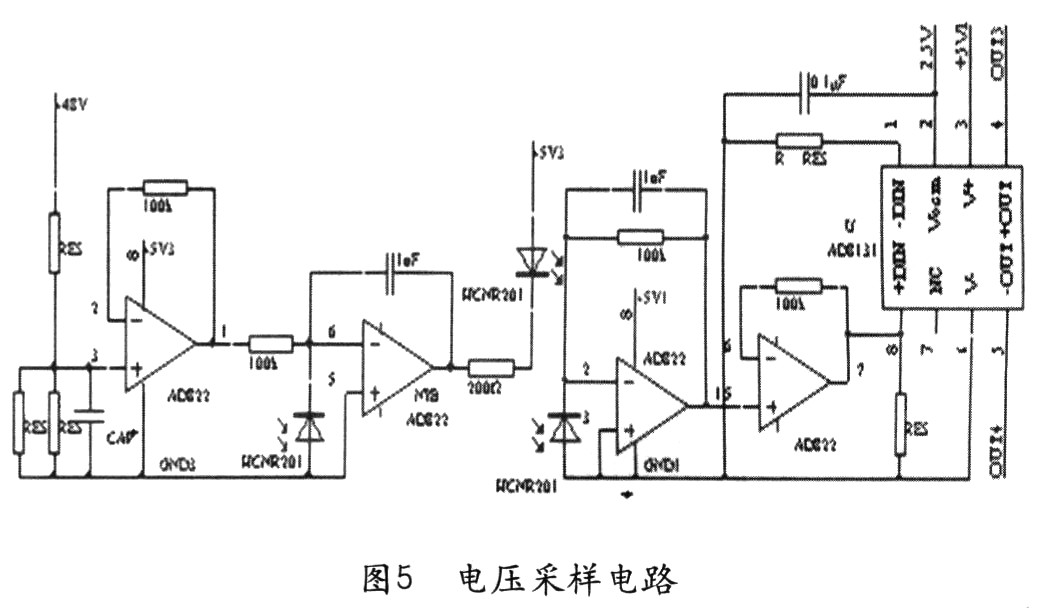
(I)电压采样电路
图5所示的电压采样电路是采样48V输出电压,经过电压跟随电路及线性光耦HCNR20l,传输给差分放大电路AD8131变成差分信号传入高速AD转换器。
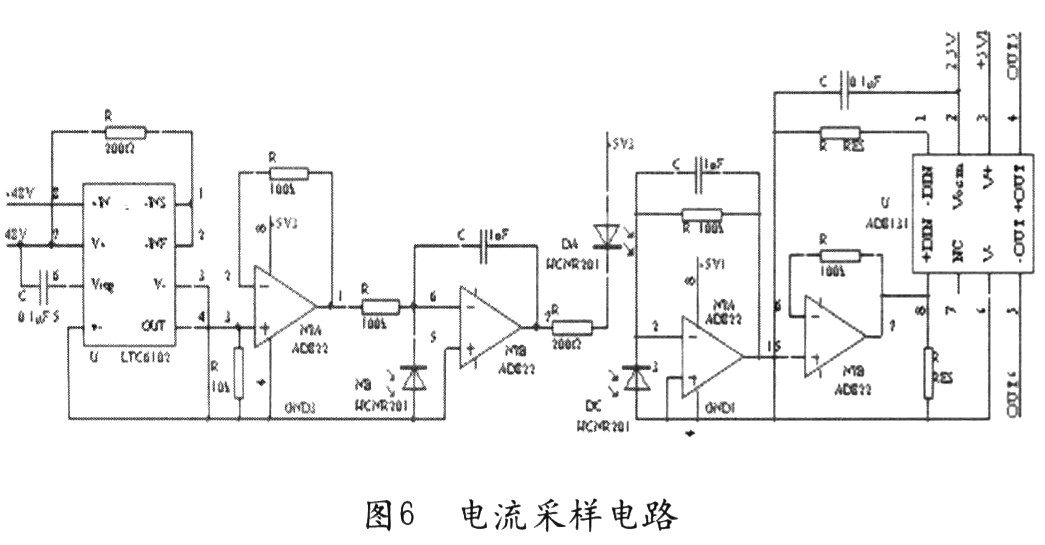
(2)电流采样电路
图6所示的电流采样电路是实时监测输出电流(20A),该采样电路由电流检测放大器LTC6102,基本放大电路,线性光耦HCNR201以及差分放大电路AD813l组成。
3 系统的软件设计
主控制器采用DSP处理芯片,外扩16位高速AD采样,以满足实时要求,控制算法采用模糊自适应PID控制算法。
控制程序主要由主程序和中断程序组成。
中断包括定时器周期中断、定时器下溢中断、比较单元比较中断。
其中,每个比较单元均会在一个对称PWM周期内产生两次匹配,一次匹配在前半周期的递增计数期间,另一次匹配在后半周的递减计数期间,所以两个比较单元会在一个PWM周期内通过四次中断完成PWM输出跳变。
4 模糊自适应PID控制器的设计
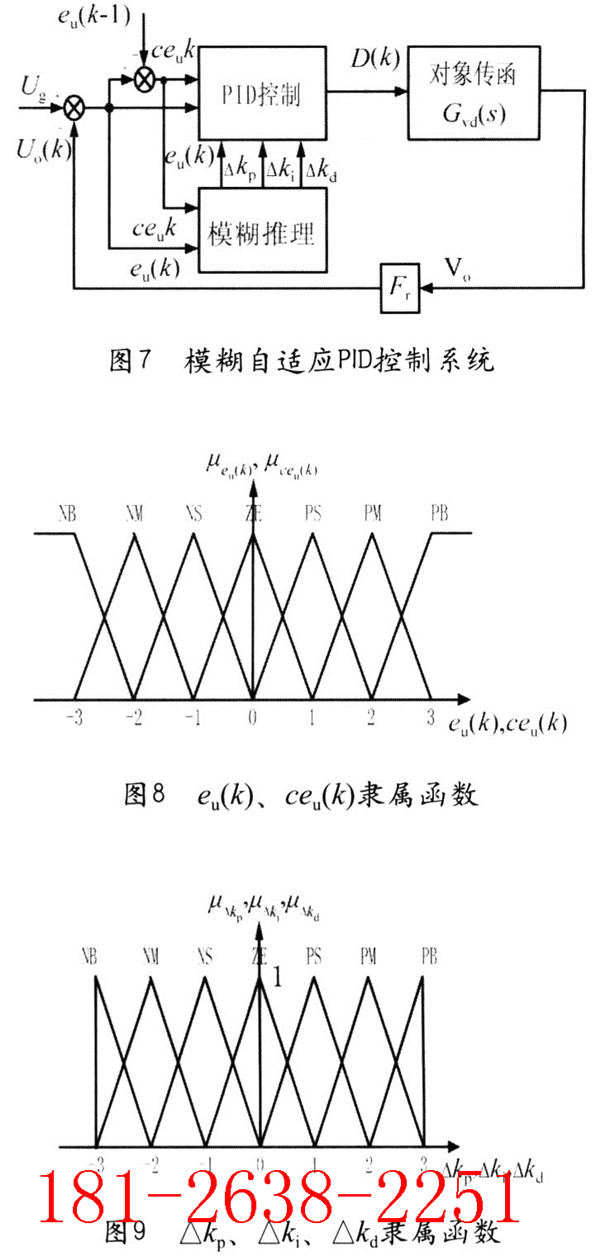
模糊自适应PID控制系统框图如图7所示,该图中模糊自适应PID控制器以电压误差eu(k)和误差变化率ceu(k)作为输入,针对不同情况对PID参数进行调节,模糊推理的输出结果△kp、△ki、△kd与常规PID控制参数kp、ki、kd分别相加,作为修正后的PID参数模糊自适应PID控制的核心在于设计模糊隶属函数和控制规则。
首先,确定模糊控制器的输入变量eu(k)和ceu(k)、输出变量△kp、△ki、△kd的模糊集合为7个模糊子集:[正大(PB),正中(PM),正小(PS),零(ZE),负小(NS)、负中(NM),负大(NB)]。
各变量的模糊集论域均为[一3,一2,一1,0,1,2,3],实际中通过调节量化因子和比例因子将各变量变化范围映射到论域范围。
隶属函数均采用三角形隶属函数,eu(k)、ceu(k),△kp、△ki、△kd的隶属度函数分别表示在图8和图9中。
模糊推理采用Mamdani方式,解模糊方法为面积重心法。
5 MATLAB仿真研究
该系统主电路使用MATLAB工具进行相关的仿真,控制算法采用模糊自适用PID算法,仿真系统如图10所示,并与传统的PID算法控制进行了比较。
并比较了两者控制性能上的差异。
被控对象由功率变换及输出滤波两部分组成。
由于DC/DC变换器的输入为稳定的400V直流电压,功率变换部分相当于一个固定的比例环节,输出滤波部分由滤波电感Lf、滤波电容Cf和负载Ro组成,为二阶振荡环节。
则被控对象的传递函数可表示为
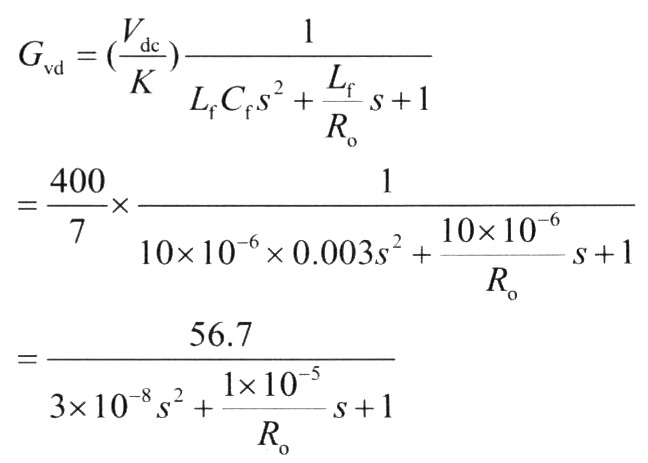
我们根据稳定边界法整定模糊自适应PID控制器的PID参数,得到kp=400、ki=20000、kd=2。
模糊白适应PID控制系统仿真模型如图10所示。
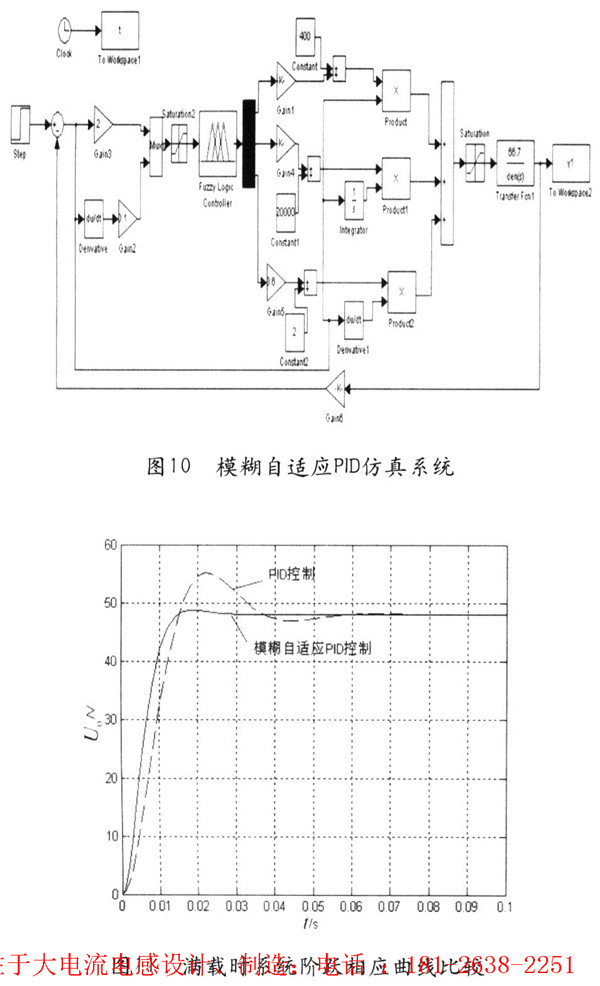
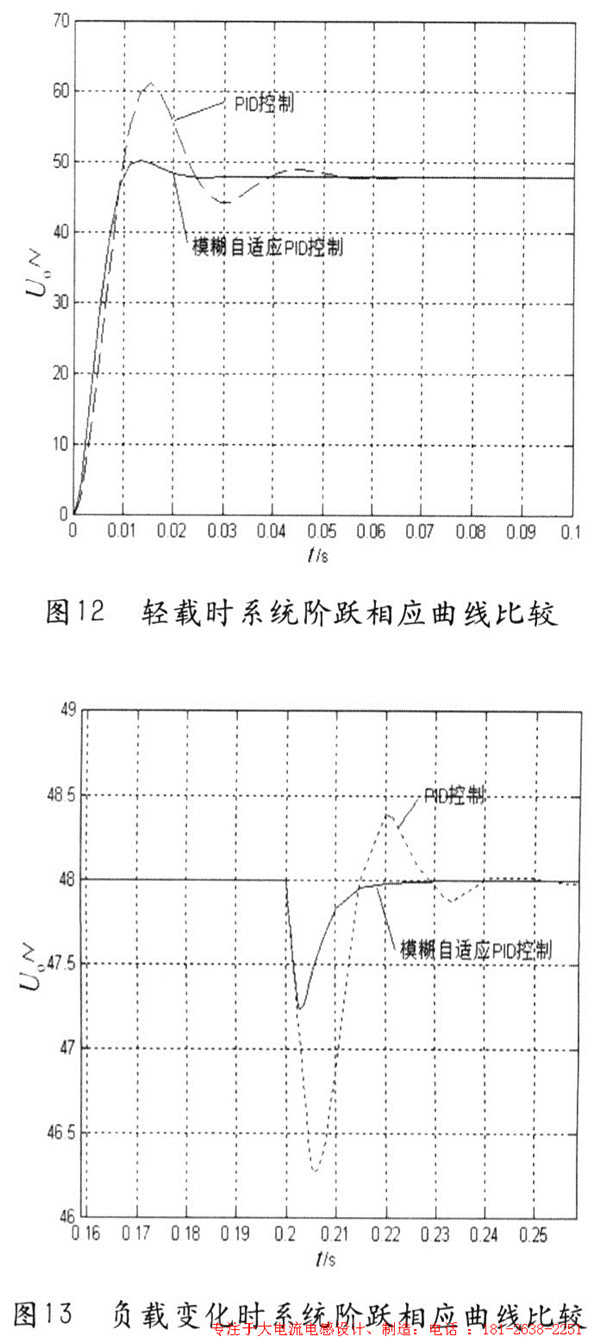
从图ll~l3曲线图可以看出,模糊自适应PID控制算法比传统PID控制算法具有更快的响应速度,更低的超调量以及更少的调节时间。
6 结束语
以设计一款48V/20A的数字通信开关电源为目标,通过对开关电源技术的深入研究,提出了以Boost型功率因数校正电路和移相全桥软开关PWaM电路为主电路拓扑、以TI公司的TMS320F2812型DSP为主控芯片的设计方案。
对模糊算法的采用进行了一些尝试,进行了以模糊PID控制器取代传统PID控制器的系统仿真,并通过仿真结果得出模糊自适应PID控制算法比传统PID控制算法具有更好的控制性能。
从而在数字开关电源的应用中,采用模糊PID控制算法能使控制系统性能得到较好的改善。
大电流电感需找IC 内置COOL MOS的IC PSR 可以做5V2A的如题 听说OB的已经出来了 内置COOL 2A的MOS SOP-8的封装的 原边的 可以做5V2A的IC了 不知道其他家的IC厂商有没有 好像听说ME SD也出来了 具体没见到型号麻烦那个知道有的请
无触点稳压器10大优点 4月08日 第三届·无线通信技术研讨会 立即报名 12月04日 2015•第二届中国IoT大会 精彩回顾 10月30日ETF•智能硬件开发技术培训会 精彩回顾 10月23日ETF•第三届 消费
SAW滤波器救援无线产品,从不切实际的分立方案
过滤器一直在RF信号通路的重要组成部分。在过去,工程师们成为熟练的滤波器设计理论和实践的复杂性,以便创建基于分立元件真正的过滤器。然而,对于今天的无线设备和应用,
 在线客服1
在线客服1