





MC9S08MG64实时时钟的校准和补偿
2016-05-25 06:28:19 点击次数:
上一篇:QUARTUS II中IP核的调用方法(图文详解) 贴片电感寻求TI技术支持:使用LM5175-Q1 3843升压,3843为什么会烧?电感发热,自己绕制的电感 有偿求助:压控振荡电路(V-F变换器) 电感饱和及电感测量的研究 相同线径,相同匝数,相同的磁芯材质,相同的骨架,相同 高精度压力传感器应用于车辆行人安全保护装置 发布需求,智能充电USB 2.0/USB 3.0/ADAPTOR电流 开关电源给若干串联电池模块供电问题 射频低噪声放大器电路设计详解 电子工程师入门宝典:最常用十大电子元器件
上图是音叉型的晶体振荡频率随温度变化的曲线,它可以用抛物线方程描述为:
Fdev = B (T - TQ)2 + K
其中:
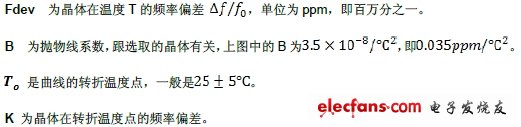
由以上分析可见,对于一个晶体振荡电路,影响其振荡频率误差的因素有:
负载电容
晶体在转折温度点的频率偏差K
温漂Fdev
因此,要使iRTC精确计时,必须消除以上因素带来的误差。负载电容可以通过振荡电路元器件的选择来保证。而后两项则必须通过软件的办法来校准和补偿。
1234下一页本文导航第 1 页:MC9S08MG64实时时钟的校准和补偿第 2 页:实时时钟的补偿原理第 3 页:实时时钟的温度补偿第 4 页:硬件配置和例程大电流电感
[充电器]S8254A 保护板 电池组不放电按照精工的S8254A的datasheet的电路设计,见下图
问题:电池组未接保护板时,充放电正常;接上保护板后,无放电。
按照datasheet上所写“把VMP端子与VDD端子短路连接,或者连接充电器可
数字转换器的创新指向传感应用,德州仪器推LDC电 一直以来摩尔定律都是指引半导体产业发展的一条重要规律,然而我们也看到这条定律似乎只对数字芯片有效,相比数字芯片每隔18个月进行一代工艺革新和晶体管量级的成倍增加,模拟
自动导航探测机器人设计 来源:电子技术应用2012年第5期作者:杨久红1,王小增1,2,李明庭1,刘祖强1,黄泽鹏12012/7/23 16:57:49摘 要: 阐述了GPS自动导航的履带式探测机器人的工作原理,设计并制
 在线客服1
在线客服1